Tin tức
Tin tức xem nhiều
xem thêm >188 máy tính công nghiệp NISE3800E và NISE3900E triển khai trong ứng dụng chuyên dụng
Máy tính công nghiệp lắp đặt trên các phương tiện...
Tích hợp máy tính chuyên dụng trong hệ thống giám sát trạm quạt thông gió ở hầm lò khai thác than
Hiện nay, nhiều mỏ than hầm lò ở Việt Nam...
Máy tính công nghiệp có quạt có thực sự lọc được hết bụi với thiết kế AirFilters?
Máy tính công nghiệp có quạt là thuật ngữ dùng...
Giải pháp demo
xem thêm >
Mạng mở rộng 5G cấp độ nhà khai thác
NEXCOM bắt tay vào sự phát triển các giải pháp...

19/06/2026
Lượt xem 10
Sự khác biệt giữa AGV và AMR
Trong lĩnh vực tự động hóa công nghiệp và logistics hiện đại, các hệ thống vận chuyển không người lái ngày càng đóng vai trò quan trọng trong việc tối ưu hóa năng suất và giảm phụ thuộc vào lao động thủ công. Hai công nghệ nổi bật nhất hiện nay là AGV và AMR, đều được thiết kế để tự động hóa việc di chuyển hàng hóa trong nhà máy và kho vận. Tuy nhiên, dù có cùng mục tiêu ứng dụng, cách thức hoạt động và mức độ linh hoạt của hai loại robot này lại hoàn toàn khác nhau, tạo nên sự khác biệt rõ rệt trong từng kịch bản triển khai.

AGV: Dẫn hướng được thiết lập sẵn trên tuyến đường
Về bản chất, AGV (Automated Guided Vehicle) là một hệ thống vận chuyển không người lái. Nó di chuyển hàng hóa trong nhà máy bằng cách đi theo các tuyến đường cố định, chẳng hạn như dây dẫn, băng từ, ray, gương phản xạ hoặc các dấu mốc trên sàn. Vì vậy, logic di chuyển của nó được thiết lập trước, không được quyết định theo thời gian thực.
AMR: Trí tuệ tích hợp ngay trên robot
Ngược lại, AMR (Autonomous Mobile Robot) dựa vào trí tuệ tích hợp. Nó có thể lập bản đồ môi trường xung quanh, tự tìm đường và sử dụng lập kế hoạch đường đi dựa trên cảm biến để tránh chướng ngại vật theo thời gian thực, thay vì đi theo tuyến đường cố định. Đây chính là sự khác biệt giữa AMR và AGV: AGV đi theo tuyến đường định sẵn AMR không bị ràng buộc bởi tuyến cố định AMR tận dụng nhận thức thời gian thực, phần mềm tiên tiến và AI nhúng để điều hướng linh hoạt trong môi trường.
Vì sao sự khác biệt này quan trọng trong tự động hóa?
Về mặt kỹ thuật, sự khác biệt giữa AGV và AMR không chỉ nằm ở cách thức di chuyển mà còn quyết định trực tiếp đến kiến trúc toàn bộ hệ thống tự động hóa.
- AGV hoạt động theo mô hình điều khiển xác định (deterministic), trong đó tuyến đường, hành vi và logic vận hành đều được lập trình sẵn và phụ thuộc vào các hạ tầng dẫn hướng vật lý như băng từ, dây dẫn hay marker trên sàn. Điều này giúp hệ thống có độ ổn định cao, dễ dự đoán và độ trễ xử lý thấp, nhưng đồng thời làm giảm khả năng thích ứng khi môi trường thay đổi.
- Ngược lại, AMR được xây dựng trên kiến trúc điều khiển dựa trên nhận thức (perception-driven), tích hợp các công nghệ như SLAM, sensor fusion, lập kế hoạch đường đi động và tránh vật cản theo thời gian thực. Nhờ đó, AMR có thể tự định vị, hiểu môi trường và đưa ra quyết định ngay tại biên (edge), nhưng đổi lại yêu cầu năng lực tính toán cao hơn, hệ thống phần mềm phức tạp hơn và hạ tầng kết nối ổn định hơn.
Chính sự khác biệt này tạo ra tác động lớn đến hiệu quả vận hành và khả năng mở rộng của hệ thống tự động hóa. Với AGV, việc mở rộng hay thay đổi quy trình thường kéo theo việc điều chỉnh hạ tầng vật lý và logic điều khiển trung tâm, dẫn đến chi phí và thời gian triển khai cao hơn, đồng thời dễ phát sinh điểm nghẽn khi có biến động trong luồng vận chuyển. Trong khi đó, AMR cho phép tối ưu vận hành theo thời gian thực thông qua định tuyến động, phân bổ nhiệm vụ linh hoạt và điều phối đội robot bằng phần mềm, từ đó nâng cao hiệu suất tổng thể trong môi trường có lưu lượng và nhu cầu thay đổi liên tục.
Vì vậy, AGV phù hợp với các hệ thống ổn định, ít biến động, còn AMR trở thành nền tảng quan trọng cho các mô hình nhà máy thông minh và logistics hiện đại, nơi yêu cầu cao về tính linh hoạt, khả năng thích ứng và mức độ số hóa.
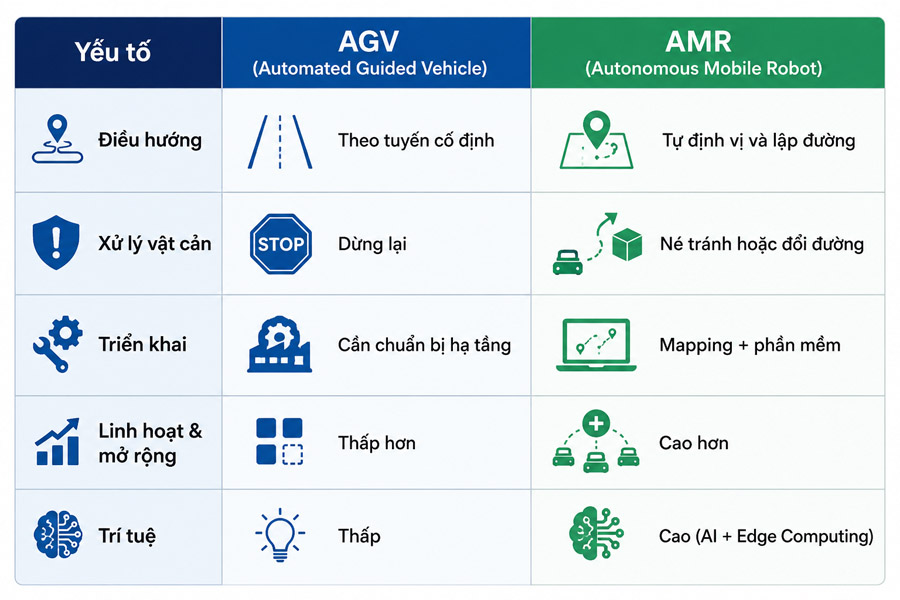
5 khác biệt chính giữa AGV và AMR
1. Điều hướng
Với AGV, bạn đang làm việc với một hệ thống định tuyến “cứng”. Các tuyến đường được mã hóa vật lý thông qua băng từ, QR code hoặc vạch quang học, đồng nghĩa với việc toàn bộ logic di chuyển phụ thuộc vào hạ tầng đã triển khai. Điều này giúp hệ thống rất ổn định và dễ kiểm soát, nhưng đổi lại gần như không có khả năng thích nghi khi layout thay đổi hoặc phát sinh tuyến mới.
Ngược lại, AMR hoạt động như một hệ thống tự hành thực thụ. Nhờ SLAM, LiDAR và bản đồ số, robot không cần “đường ray vô hình” mà có thể tự xác định vị trí và lập kế hoạch đường đi theo thời gian thực. Với một kỹ sư, điều này đồng nghĩa với việc bạn không còn phải “thiết kế đường đi trước”, mà thay vào đó là thiết kế logic vận hành linh hoạt dựa trên phần mềm.
2. Xử lý chướng ngại vật
Trong môi trường thực tế, chướng ngại vật là điều không thể tránh khỏi. Với AGV, khi có vật cản xuất hiện trên tuyến đường, robot sẽ dừng lại vì không có khả năng “ra quyết định” ngoài kịch bản đã lập trình. Điều này có thể gây gián đoạn dây chuyền nếu tần suất xuất hiện vật cản cao.
AMR thì khác. Nhờ cảm biến và thuật toán lập kế hoạch đường đi, robot có thể giảm tốc, đánh giá không gian xung quanh và chọn tuyến thay thế nếu khả thi. Với các hệ thống có mật độ người và xe nâng cao (như kho logistics), khả năng này giúp duy trì dòng vận chuyển liên tục thay vì bị “tắc nghẽn cục bộ”.
3. Triển khai
Từ góc độ triển khai dự án, AGV yêu cầu bạn phải “chuẩn bị mặt bằng” trước: dán băng từ, lắp đặt marker, hiệu chỉnh tuyến và kiểm thử nhiều vòng. Điều này khiến thời gian triển khai kéo dài và phụ thuộc nhiều vào hạ tầng vật lý.
Trong khi đó, AMR chuyển phần lớn độ phức tạp sang phần mềm. Bạn chỉ cần mapping môi trường, cấu hình nhiệm vụ và tích hợp hệ thống quản lý. Điều này giúp rút ngắn thời gian triển khai và đặc biệt hữu ích trong các dự án cần rollout nhanh hoặc triển khai theo từng giai đoạn.
4. Tính linh hoạt và khả năng mở rộng
Nếu bạn đang thiết kế một hệ thống có vòng đời dài, yếu tố mở rộng là cực kỳ quan trọng. Với AGV, mỗi lần thay đổi layout hoặc thêm tuyến mới gần như đồng nghĩa với việc chỉnh sửa hạ tầng – tốn chi phí và có thể ảnh hưởng đến vận hành hiện tại.
AMR lại phù hợp với mô hình mở rộng theo nhu cầu. Bạn có thể bổ sung robot mới, cập nhật bản đồ hoặc thay đổi workflow chỉ thông qua phần mềm. Điều này đặc biệt quan trọng trong các ngành như e-commerce hoặc sản xuất linh hoạt, nơi nhu cầu thay đổi liên tục.
5. Trí tuệ và điện toán biên
Sự khác biệt cốt lõi nằm ở “bộ não” của hệ thống. AGV có logic điều khiển tương đối đơn giản, chủ yếu là bám tuyến và thực hiện các lệnh định trước, nên yêu cầu xử lý không cao.
Ngược lại, AMR cần liên tục thực hiện các tác vụ phức tạp: định vị, nhận thức môi trường, hợp nhất dữ liệu cảm biến, lập kế hoạch và điều phối đội robot. Điều này đòi hỏi nền tảng điện toán biên mạnh mẽ để xử lý AI và ra quyết định theo thời gian thực. Với kỹ sư hệ thống, đây là điểm cần cân nhắc kỹ về phần cứng, nền tảng AI và khả năng tích hợp.
Khi nào nên chọn AGV hoặc AMR?
Chọn AGV khi:
- Bài toán vận chuyển lặp lại, tuyến cố định
- Môi trường ổn định, ít thay đổi
- Ưu tiên độ tin cậy và tính dự đoán cao
Chọn AMR khi:
- Layout thay đổi thường xuyên
- Có nhiều tác nhân động (người, xe nâng…)
- Cần tối ưu luồng vận chuyển theo thời gian thực
Cách NEXCOM thúc đẩy triển khai AMR thông minh
NEXCOM giúp đẩy nhanh việc triển khai AMR bằng cách cung cấp nền tảng tính toán, kết nối và tích hợp cho các nhà phát triển robot.
- Nền tảng NVIDIA Jetson hỗ trợ xử lý AI với hiệu năng 20–275 TOPS
- Bộ điều khiển RCB 600 hỗ trợ phát triển ROS x86-64 với CAN, GPIO, COM
- ISA 141 cung cấp kết nối mạng DIN-rail nhỏ gọn với Wi-Fi và 5G

ISA 141
Thiết bị mạng OT DIN Rail Form Factor
- Intel Atom® x6413E processor SoC, BGA type
- 1 x SODIMM DDR4 3200 8GB module
- 1 x 40GB SSD module
- 1 x RJ45 console port
- 2 x USB 3.0
- 3 x 1GbE RJ45 with 1 combo port
- Dual Wi-Fi 6E
- Dual LTE/5G
- Dual DC (9~36VDC)
- Supports OOB
Mini-ITX Tiger Lake-UP3 Intel® 11th Gen Core™ i7/i5/i3
-
11th Gen Intel® Core™ i processors
-
1 x VGA and 1 x HDMI display ports
-
2 x SO-DIMM DDR4 with non-ECC 3200MHz up to 64GB
-
2 x Intel® GbE LAN ports and 1 x 2.5 GbE LAN
-
7 x USB 3.2 (Gen1), 4 x USB 2.0
-
2 x RS232 and 2 x RS232/422/485
-
1 x SATA 3.0 port
-
1 x Full size mini-PCIe slot
-
2 x M.2 Key B
-
Onboard TPM
-
24V DC input

High Performance NVIDIA® Jetson AGX Orin™
-
Built-in NVIDIA® Jetson AGX Orin™ SOM, up to 200/275 INT8 Sparse TOPS AI performance
-
Designed to be fanless, rugged, and compact
-
6 x GbE PoE+ port for IP CAM/LiDAR sensors, optional 1 x 10GbE port
-
HEVC/H.265 hardware decode, supports up to 7 x 4K30
-
Wide range operating temperature of -25°C~60°C
-
Ultra-speed PCIe 4.0 x4 NVMe SSD for data integrity
-
Expansible for GNSS, LTE/5G NR & Wi-Fi 5/6
-
9V~36V DC-in with ignition control & OCP/UVP
-
NEXCOM Acceleration Linux (NAL) integrated w/ JetPack 6.1
-
Military standard of MIL-STD-810H for anti-vibration/shock
-
CE/FCC, UKCA, E-mark Certified
Các nền tảng này được thiết kế cho môi trường công nghiệp với thiết kế không quạt, chuẩn IP67 (tùy model), chịu nhiệt độ khắc nghiệt, rung sốc và hỗ trợ kết nối camera, LiDAR và hệ thống cyber-physical. Nhờ đó, các nhà tích hợp hệ thống có thể xây dựng giải pháp AMR công nghiệp đáng tin cậy với ít rủi ro triển khai hơn.
Câu hỏi thường gặp
AMR có đắt không?
Không hẳn. Chi phí ban đầu có thể cao hơn AGV, nhưng tổng chi phí dự án giảm do ít cần cải tạo hạ tầng và không làm gián đoạn sản xuất. Thời gian hoàn vốn thường từ 12–18 tháng.
AMR điều hướng như thế nào?
AMR không cần ray hay băng từ. Nó sử dụng LiDAR, thị giác máy và điện toán biên để xây dựng bản đồ số theo thời gian thực và tự điều hướng.
AMR có an toàn không?
Có, nếu được thiết kế đúng. AMR sử dụng cảm biến an toàn, phát hiện con người và tuân thủ các tiêu chuẩn như ISO 3691-4 để giảm tốc, né tránh hoặc dừng an toàn.
Bảo trì AMR khác AGV thế nào?
- AMR: tập trung vào cảm biến, pin, phần mềm và bản đồ
- AGV: tập trung vào hệ thống dẫn hướng vật lý



 NHÀ PHÂN PHỐI
NHÀ PHÂN PHỐI

